Making robots work
when the world
gets messy.
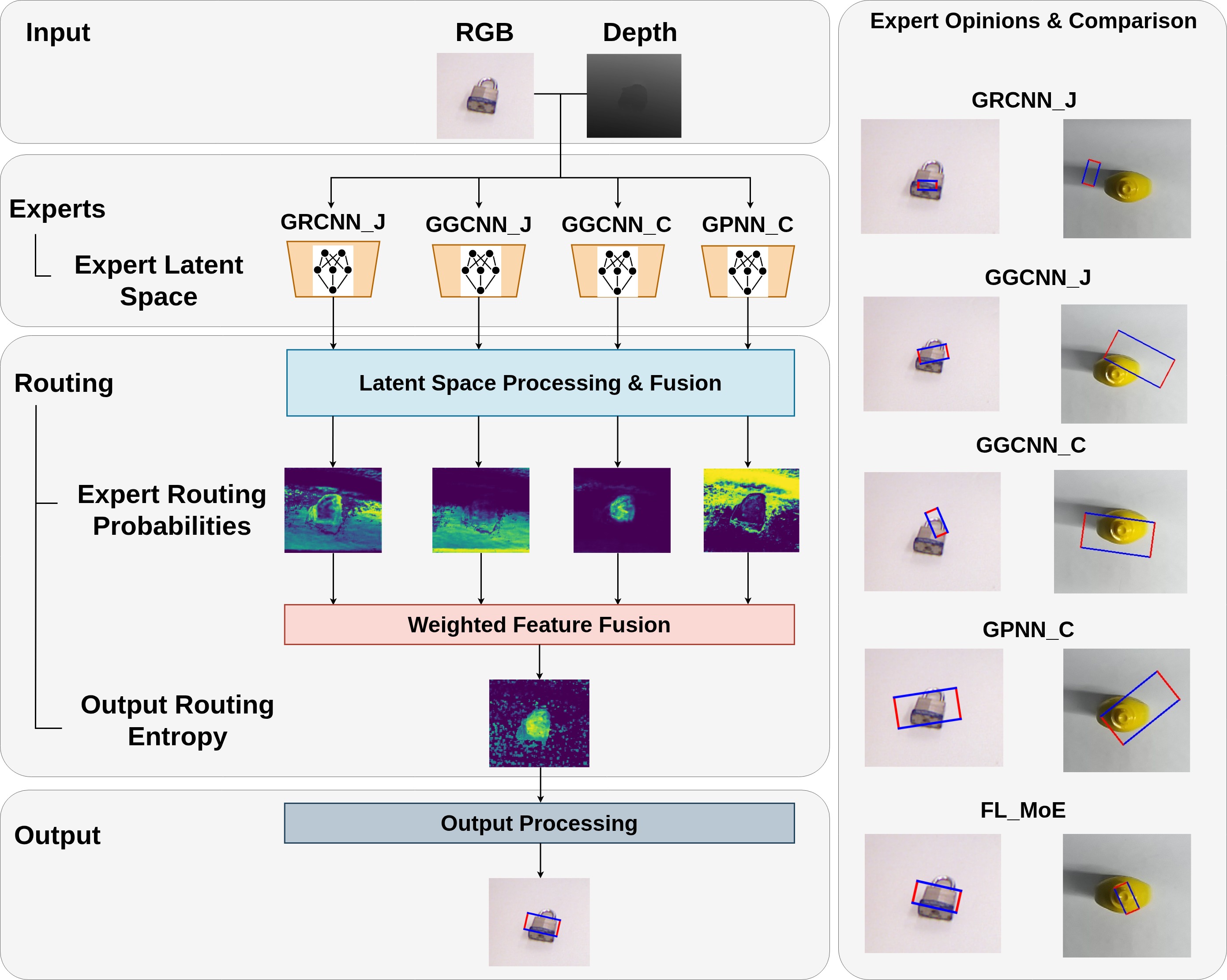
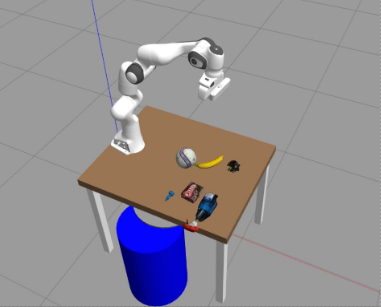
I build perception and learning systems for robotics - from grasp detection and occlusion-robust vision to vision-language models, validated end-to-end on physical robots.

Venkatesh Mullur
4+
Years DL &
Robotics Research
Robotics Research
3
Publications &
Conferences
Conferences
3
Robot Platforms
Deployed On
Deployed On
🏊
Swimmer, Soccer player