
About Me
Passionate about computer vision, deep learning, and machine learning, seeking opportunities to utilize these skills in various domains like Robotics, Medical & Autonomous Vehicles.
Hello there!
I'm Venkatesh Mullur, a 2023 Robotics Engineering graduate from Worcester Polytechnic Institute. Passionate about leveraging computer vision, deep learning, and artificial intelligence, I aim to bridge the gap between humans and machines. Witnessing Yamaha's Motobot struggle against Valentino Rossi in a race piqued my interest in the critical gap between perceiving the environment and real-world decision-making, especially in dynamic situations. Inspired from the above written quote, I'm keen on empowering machines to perceive, understand, and interact with the world as effectively as humans.
I am actively pursuing full-time opportunities to apply my skills and contribute to real-world robotics applications. As a Machine Vision Engineer at CogniAux Lab with Dr. Ali Yousefi , I developed a multi-modal framework for analyzing human emotions through pose estimation in dynamic environments using machine learning. This project underscores my proficiency in applying computer vision and deep learning to impactful endeavors with the potential to enhance people's lives.
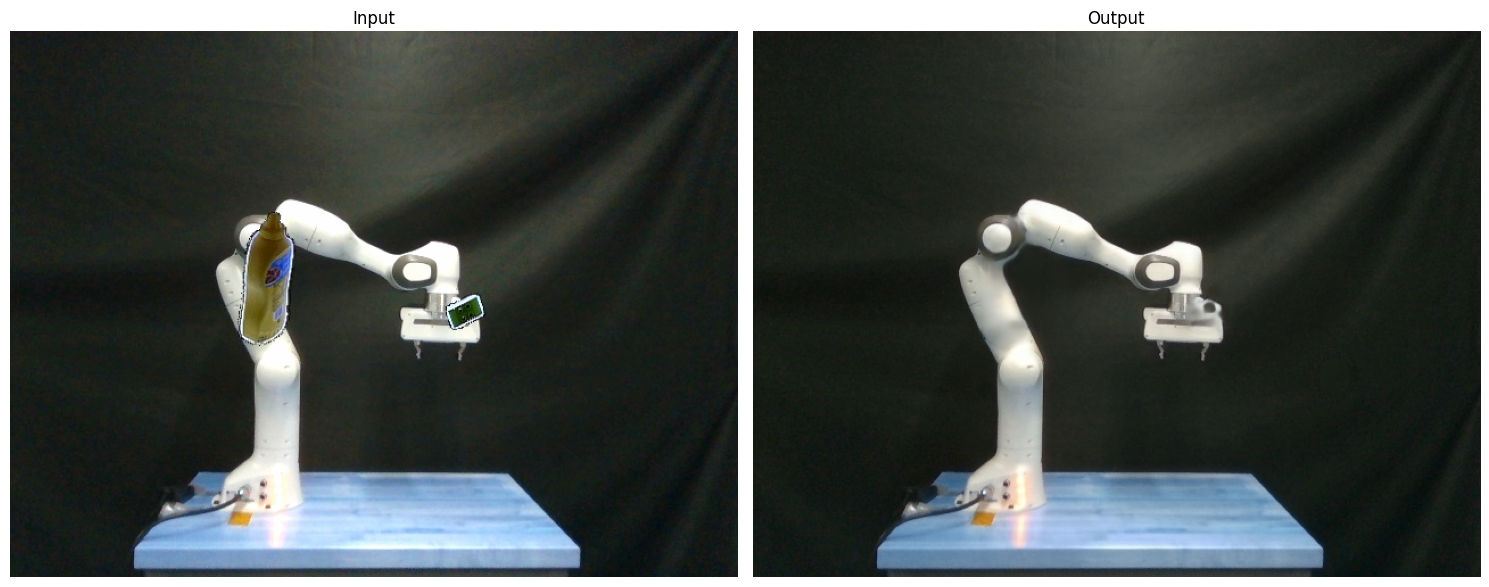
In my role as a Perception Researcher under Dr. Berk Calli, I applied computer vision and robotics to create a real-time system for precise keypoint detection and pose estimation on the Franka Panda Robot in cluttered and occluded environments. Tasks included improving enhancing point tracking and assessing AI models for image inpainting. This project showcases my capacity to translate theoretical knowledge into practical solutions, addressing real-world challenges in robotics.
Experienced in industry dynamics, I served as an Image Processing and Computer Vision Intern at DigiM Solution LLC. Here, I honed skills in noise reduction, 3D reconstruction, & image segmentation while fostering teamwork.
I am eager to connect with individuals and organizations who share my passion for the future of robotics. Let's explore the possibilities of how we can collaborate to create a more intelligent and interactive world!
Skills
Timeline
-
2018-2019 Dec-May
Embedded Linux Intern at IoTIoT.in
Skills Learned: Embedded Systems, Linux Kernel, Technical Skills like V4L2, I2C and Linux Filesystem, Networking, Version Control, Programming Languages like C++, Problem Solving.
-
2020 Aug-Nov
Embedded Systems and IoT Intern at Exa Mobility
Skills Learned: Hardware Integration, Sensors and Safety Systems, Embedded Systems, Technical Research, Programming Languages like Python
-
2020
Graduated as Electronics and Telecommuncation Engineer
Skills learned: Image Processing, Electronics, Signal Processing, Machine Learning, Robotics, Computer Networks, Deep Learning, Coding skills like python & C++.
-
2021
Started MS in Robotics Engineering at WPI
Skills Learned: Linear algebra, computer vision, deep learning, Robot Manipulation, Robot Perception, Robot Control, Motion Planning, Reinforcement Learning, Biomedical Robotics, teamwork.
-
2022-2023 Dec-April
Image Processing, Data Analysis, Computer Vision at DigiM Solution LLC
Skilles Learned: Technical Skills and research, Quantitative Data Analysis, Teamwork and Collaboration, Critical Thinking, computer vision, CI/CD, version control, docker and AWS.
-
2023 June-current
Perception Researcher at Manipulation and Environmental Robotics Lab
Skills Learned: Vision based robot manipulation, robotics, deep learning, generative AI, Problem Solving & Optimization, Technical Research & Evaluation, Teamwork.
-
2024 Jan
Machine Vision Engineer at CogniAux Labs
Skills Learned: Multi-modal Framework Development, Sensor Fusion, Communication, Team Management, Adaptability.
| Skills | Description |
|---|---|
| Computer Vision |
|
| Deep Learning |
|
| Robotics |
|
| Programming Skills |
|
| Project Experience |
|
Resume
I am actively looking for Full-Time opportunities in Medical Computer Vision, Autonomous Driving Assistant System (ADAS), Machine Learning and Image Processing.
A pdf version of my resume is here.
Summary
Venkatesh Mullur
3+ years of experience 3D Computer Vision, Deep Learning and Machine Learning.
2+ years Trained Professional in Robotic Perception Systems
- vmullur@wpi.edu
Education
Master of Science in Robotics Engineering
2021 - 2023
Worcester Polytechnic Institute, Worcester, MA
- Artificial Intelligence: CS534
- Robot Dynamics: RBE501
- Robot Controls: RBE502
- Motion Planning: RBE550
- Biomedical Robotics: RBE580
- Classical and Deep Learning Approaches for Geometric Computer Vision: RBE549
- Reinforcement Learning: RBE525
Bachelor of Engineering in Electronics and Telecommunication
2016 - 2020
Savitribai Phule Pune University (formerly Pune University), Pune, India
- Machine Learning
- Image and Video Processing
- Fundamentals of Robotics
Research
Deep Learning based Side-Channel Analysis
April 2022 - Sept 2022
Vernam Lab, WPI, Worcester, MA
- Performed PCA to improve the feature extraction and integrated it with Learning to Rank models for analyzing side-channel attacks, AES vulnerabilities and it's countermeasures.
- Implemented ListNet and ListMLE on the ASCAD Dataset to find the ranking of the AES sub-keys using Pytorch. Improved the model by tuning hyperparameters to get optimal nDCG gains(0.67 nDCG).
Teaching Experience
WPI
- Teacher's Assistant: Machine Learning, Prof. Ali Yousefi Jan 2023 - Jan 2024
- Graduate Tutor: Contemporary Electric Power Systems, Prof. Gregory Noetscher Aug 2022 - Nov 2022
- Graduate Teaching Assistant: Calculus III, Prof. Duncan Wright Jan 2022 - April 2022
Publications
Experience
Perception Researcher
June 2023 - Present
Manipulation and Environmental Robotics Lab (MERL, WPI)
- Developed a real-time system for accurate keypoint detection and pose estimation on Franka Panda Robot despite occlusions to achieve an IOU of 0.76.
- Evaluated the performance of Vision Transformers (ViTs), LaMa, Contextual Encoders, and Generative Adversarial Networks (GANs) and chose WGAN-GP for Image Inpainting.
- Enhanced robustness in occluded scenarios by employing Keypoint RCNNs incorporating Graph Neural Networks (GNNs), thereby elevating visual servoing & robot perception capabilities.
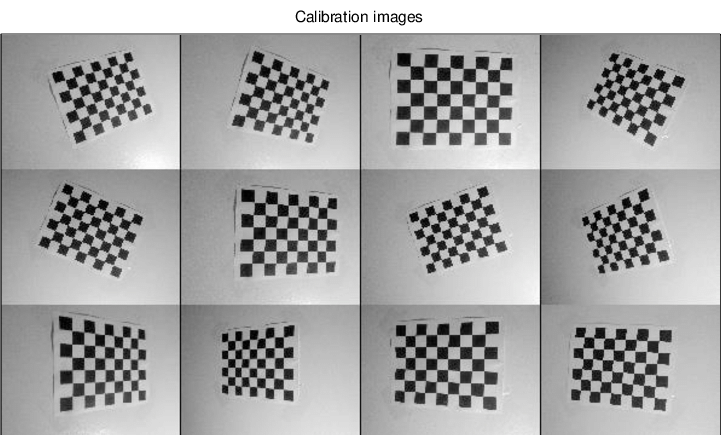
- Leveraged Generative Adversarial Networks (GANs) with attention for image inpainting, achieving 91.6% real-time accuracy, minimizing camera calibration and surpassing existing methods.
Machine Vision Engineer
December 2023 - Present
Cogni-Aux Labs
- Developed a multi-modal framework to perform sentimental analysis in personalized environment control (PEACE) rooms using videos & depth images from Zed 2i cameras, audio, physiological, and text data.
- Leveraged 3D computer vision techniques to determine the spatial transformation between two cameras, facilitating seamless integration of depth and pose estimation.
- Extracted human pose & activity indicators from video for real-time stress estimation using OpenPose; Analyzed facial features and voice tone to estimate emotion levels using Temporal Attention Models.
- Performed sensor fusion to identify optimal room configurations that maximizes individual stress reduction.
Image Processing, Image Data Analysis (computer vision) Intern
Jan 2023 - May 2023
DigiM LLC, Woburn, MA
- Implementing machine learning, deep learning and 3D segmentation solutions on 3D microscopic images to perform quantitative analysis, reconstructing 3D materials achieving predictive property simulation.
Embedded Systems and IoT Intern
Aug 2020 - Nov 2020
Exa Mobility, Pune, India
- Efficiently interfaced Cavli GPS & GSM system to ESP32 by using UART, I2C & SPI to check the upstream and downstream speeds through https.
- Implemented Safety Features in the Electric Vehicle using ESP32, IMU sensor and Ultrasonic sensor module HCSR04 & proximity sensors by determining the physical speed of the EV.
Portfolio
Find my projects on my github profile.




Testimonials
It has been a pleasure to work with Venkatesh. He is very easy to communicate. He is thorough and systematic in his work. He is kind and respectful. He might seem a bit too quiet at first glance, but he is not afraid to engage in in-depth discussions. He has a solid work ethic. He has been getting more independent throughout his study.

Dr. Berk Calli
Assistant Professor,
Robotics Engineering Program,
Worcester Polytechnic Institute
+1-508-831-5448
bcalli@wpi.edu
Venkatesh has proven himself to be an astute, dedicated, and capable individual with exceptional critical thinking and teamwork skills. Based on his commendable attributes and achievements outlined above, I am confident that Venkatesh is an exceptionally competitive candidate at your institution
